特征值与特征向量的核心动机
在线性代数中,我们经常需要处理输入向量 x 经过矩阵 A 的线性转换,得到输出向量 Ax。当矩阵 A 非常庞大(例如 1000×1000)且需要进行多次转换(例如 Akx)时,直接相乘的计算量会非常惊人。
特征值与特征向量的发明正是为了解决这个问题。对于一个矩阵 A,如果我们能找到特定的向量 x(即特征向量),使得 A 作用在 x 上时,其效果等同于纯量 λ(即特征值)乘上 x:
Ax=λx
那么,高维度的矩阵乘法就被简化成了简单的纯量倍数放大或缩小
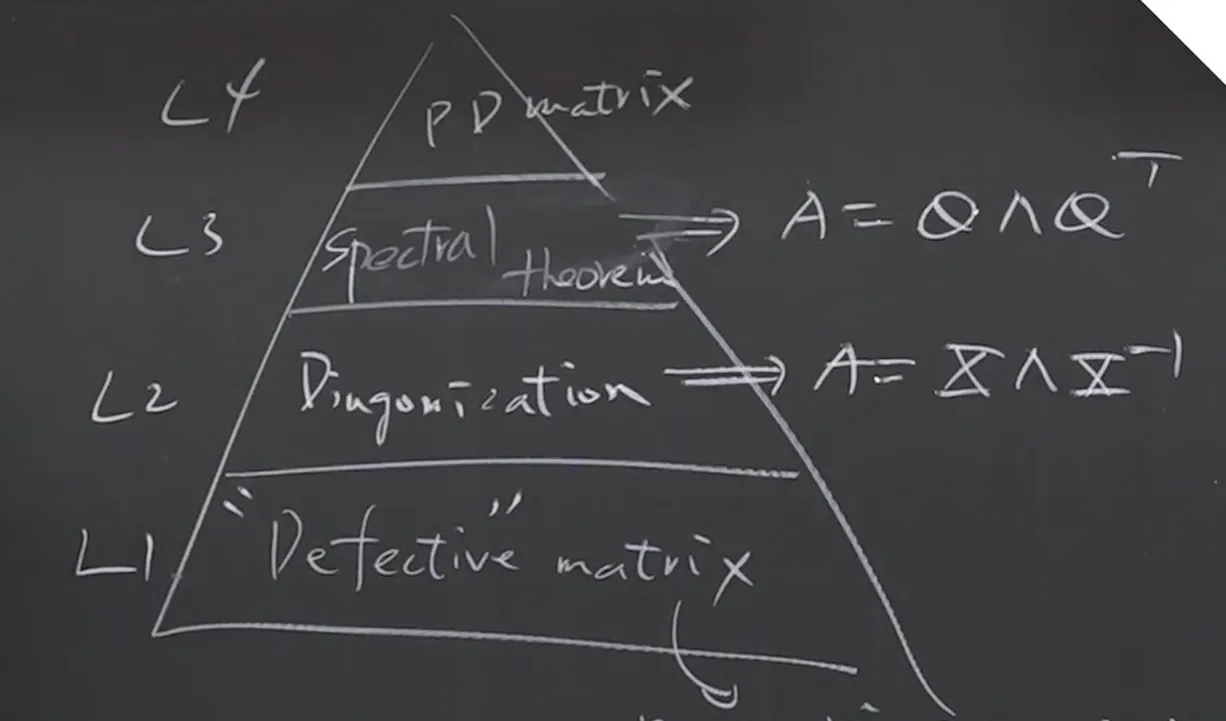
矩阵的金字塔阶级
基于特征向量的表现,矩阵被划分为一个严阶级的“金字塔”:
-
L4金字塔底层:瑕疵矩阵 (Defective Matrix)
- 定义: 虽然能算出特征值(通常伴随重复的特征值),但在求零空间时,找不到 n 条线性独立的特征向量的矩阵。
- 后果: 这种矩阵“残缺不全”,无法凑齐构成 n 维空间的基底 (Basis)。因此,它无法被对角化,在应用上最难处理。
-
L3金字塔中层:可对角化矩阵 (Diagonalizable Matrix)
- 定义: 如果一个 n×n 矩阵能够提供 n 条线性独立的特征向量。
- 优势: 这 n 条特征向量可以组成 n 维空间的基底。我们可以将这些特征向量排成一个矩阵 X(特征向量矩阵),从而将原矩阵 A 分解为:
A=XΛX−1
(其中 Λ 是由特征值组成的对角矩阵)。所有复杂的 A 的运算,都可以转化为极简的 Λ 对角矩阵的运算。
-
L2金字塔顶层:完美矩阵 (具有谱定理 Spectral Theorem 的矩阵)
- 定义: 例如对称矩阵 (Symmetric Matrix)。
- 优势: 这种矩阵不仅能找到 n 条独立的特征向量,而且这 n 条特征向量天然互相垂直 (Orthogonal)。
- 此时对角化公式会进化为 A=QΛQT(其中 Q 是正交矩阵,反矩阵 Q−1 直接等同于转置矩阵 QT),这在工程和纯数学中都是最优美、最好算的形态。
- L1最上层
- PD matrix: 天龙人
- 同时满足矩阵对角化这个空间中最为完美的要求,同时也满足逆矩阵世界中最完美的要求(可逆)
什么是对角化

Normal matrix
这也就是第二层的矩阵
满足AHA=AAH
**正规矩阵(Normal Matrix)在线性代数和数值计算中非常重要,主要因为它是谱定理(Spectral Theorem)**成立的最广泛类矩阵。
简单来说,正规矩阵的核心用处在于:它可以被“完美地”对角化(或块对角化),且变换过程保持几何结构不变(正交/酉变换)。
对角化例题
对于矩阵 A=[21212121],其对角化公式为:
A=PDP−1
其中:
-
对角矩阵 D(由特征值组成):
D=[1000]
-
可逆矩阵 P(由对应的线性无关特征向量组成):
P=[111−1]
-
逆矩阵 P−1:
P−1=21[111−1]=[212121−21]
推导简述:
-
求特征值:
由于 A 的每一行和为 1,且秩为 1(两行相同),故特征值为 λ1=1,λ2=0。
(或者通过特征方程 ∣λI−A∣=λ(λ−1)=0 求得)。
-
求特征向量:
- 对于 λ1=1:解 (I−A)x=0⇒[1/2−1/2−1/21/2][x1x2]=0,得 x1=x2。取特征向量 v1=[11]。
- 对于 λ2=0:解 Ax=0⇒[1/21/21/21/2][x1x2]=0,得 x1=−x2。取特征向量 v2=[1−1]。
-
构造 P 和 D:
P=[v1,v2]=[111−1],D=diag(1,0)
-
验证:
PDP−1=[111−1][1000][212121−21]=[1100][212121−21]=[21212121]=A
注意:由于 A 是实对称矩阵,它也是正规矩阵,因此可以进行正交对角化。若选取单位正交特征向量,则 P 为正交矩阵,满足 P−1=PT。
此时 Q=[212121−21],公式为 A=QDQT。
使用对角化求解幂次问题
A=[01−10] Calculate A4
首先求 A 的特征值 λ:
det(A−λI)=det[−λ1−1−λ]=λ2+1=0⟹λ=i,−i
根据矩阵次方的性质,Ak 的特征值是原特征值的 k 次方:
- λ14=i4=1
- λ24=(−i)4=1
由于 A4 的特征值全是 1,且 A 是可对角化的,这意味着 A4 的对角化形式 Λ4 就是单位矩阵 I。
A4=XΛ4X−1=X[1001]X−1=XIX−1=I
最终答案:
A4=[1001]
什么是谱定理 Spectral theorem
矩阵可以进行对角化,也就是有充足的特征向量能够覆盖整个空间。
在这个基础上,这些basis之间还是互相垂直的。
这是集合了两种最好的basis
- Orthogonal basis
- Engenvector basis
